Hardware
Als je overweegt om een trekker uit te rusten met GPS, met als doel om automatisch recht te kunnen rijden, wil je natuurlijk weten wat daarvoor nodig is.
We beginnen eerst met de hardware. Wat moet er aan-, op, en in de trekker worden gebouwd?
-
-
De trekker wijzer maken / voorzien van de juiste informatie.
- GPS-ontvanger(s). De belangrijkste informatie die we nodig hebben, is de locatie waar de trekker precies is. Om de locatie te kunnen bepalen van de trekker, hebben we één of twee GPS-ontvangers nodig. Een GPS-ontvanger is een apparaat dat GPS-signalen van satellieten ontvangt en gebruikt om de locatie van de trekker te bepalen. Er zijn verschillende soorten GPS-ontvangers beschikbaar, belangrijk voor dit project is dat ze kunnen omgaan met correctiepakketten (RTK) om tot een nauwkeurigheid van plus minus 2 cm te kunnen komen. Verder is het belangrijk, dat de antenne van de gps-ontvanger(s) op een metalen plaat wordt geplaatst met vrij zicht naar de satellieten (dus op het dak).
- Wielhoeksensor. Een wielhoeksensor, ook wel bekend als een stuurhoeksensor of stuursensor, is een component die wordt gebruikt om de hoek van de voorwielen van een voertuig te meten. In het geval van een trekker of landbouwvoertuig verwijst dit naar de hoek van de voorwielen ten opzichte van de lengteas van het voertuig. De wielhoeksensor is een cruciale component voor het nauwkeurig volgen van het gewenste pad.
- Roll-sensor. Een roll sensor helpt bij het handhaven van een constante en juiste werkhoek, vooral op heuvelachtig terrein, om ervoor te zorgen dat de werkzaamheden efficiënt en nauwkeurig worden uitgevoerd.
- Richtings-sensor. Een richtings-sensor helpt de voertuigbesturing ondersteunen door de exacte richting van het voertuig te meten. Er kan ook worden gekozen voor een dubbele GPS-ontvanger. Hierdoor komt de noodzaak om een losse richtings-sensor te vervallen. Het principe is heel simpel: als je twee gps-ontvangers met hun antenne minimaal 1 meter uit elkaar hebt geplaatst, krijg je twee verschillende locaties en kan je bepalen wat de richting is waar je naartoe beweegt.
- GPS-correctiesignaal (RTK). Een standaard GPS positie heeft een nauwkeurigheid van enkele meters, dit is natuurlijk voor precisielandbouw onvoldoende. Met het toevoegen van een GPS-correctiesignaal kan een nauwkeurigheid bereikt worden van 2 cm. Dit signaal kan door de trekker ontvangen worden via de lucht als radiosignaal en/of via het internet, via een NTRIP server. Feit is wel dat elke KM dat je van de basis af zit (dus waar het correctiesignaal gemaakt wordt) de nauwkeurigheid met 1 cm afneemt.
- Internet. Dit kan via een usb 4g dongel en een simkaart, of een verbinding naar de telefoon in je broekzak via wifi/bluetooth. Het kan zonder, als je een GPS-correctiesignaal via de lucht (radio) gebruikt, maar het is in de praktijk wel heel handig als je:
- net buiten bereik van de radio bent en toch via NTRIP verder kan rijden.
- gegevens van een perceel kan opzoeken of juist ergens centraal kan opslaan.
-
Informatie verwerken en trekker aansturen.
-
-
-
- Tablet / besturingscomputer: Een besturingscomputer is nodig om:
- de verzamelde informatie te verwerken (gps + sensoren).
- de gebruiker te laten bepalen wat de gewenste lijn of weg is om te rijden.
- constateren op basis van de data, of / hoeveel en welke kant de trekker moet sturen en dit door te geven aan de autostuur computer.
- Autostuur computer. Dit is de computer die de gegevens van de trekker ontvangt en na verwerking door de besturingscomputer ook de trekker weer aanstuurt.
- Tablet / besturingscomputer: Een besturingscomputer is nodig om:
-

Voorbeeld van een trekker met Panasonic FZ-G1 tablet als besturingscomputer.
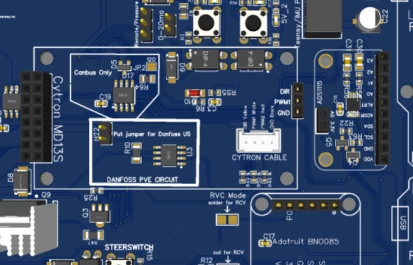
Deel printplaat van een autostuur computer.
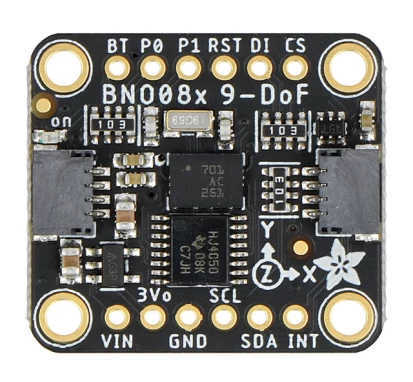
Voorbeeld van een gecombineerde sensor voor de Roll en Richting.